发表自话题:360人工在线服务
这篇文章中的测评对象是 360的最新款旗舰 X100,如果大家正好在关注新品,那么耐心看完这篇文章一定会对你的决策有所帮助。
以下是正文。

目前市面上主流的扫地机器人,主要采用两种导航解决方案:视觉识别系统和激光雷达系统。其中,激光雷达系统在建图精度和导航准确性方面又更具优势,是当下几乎所有品牌旗舰机型所采用的方案。
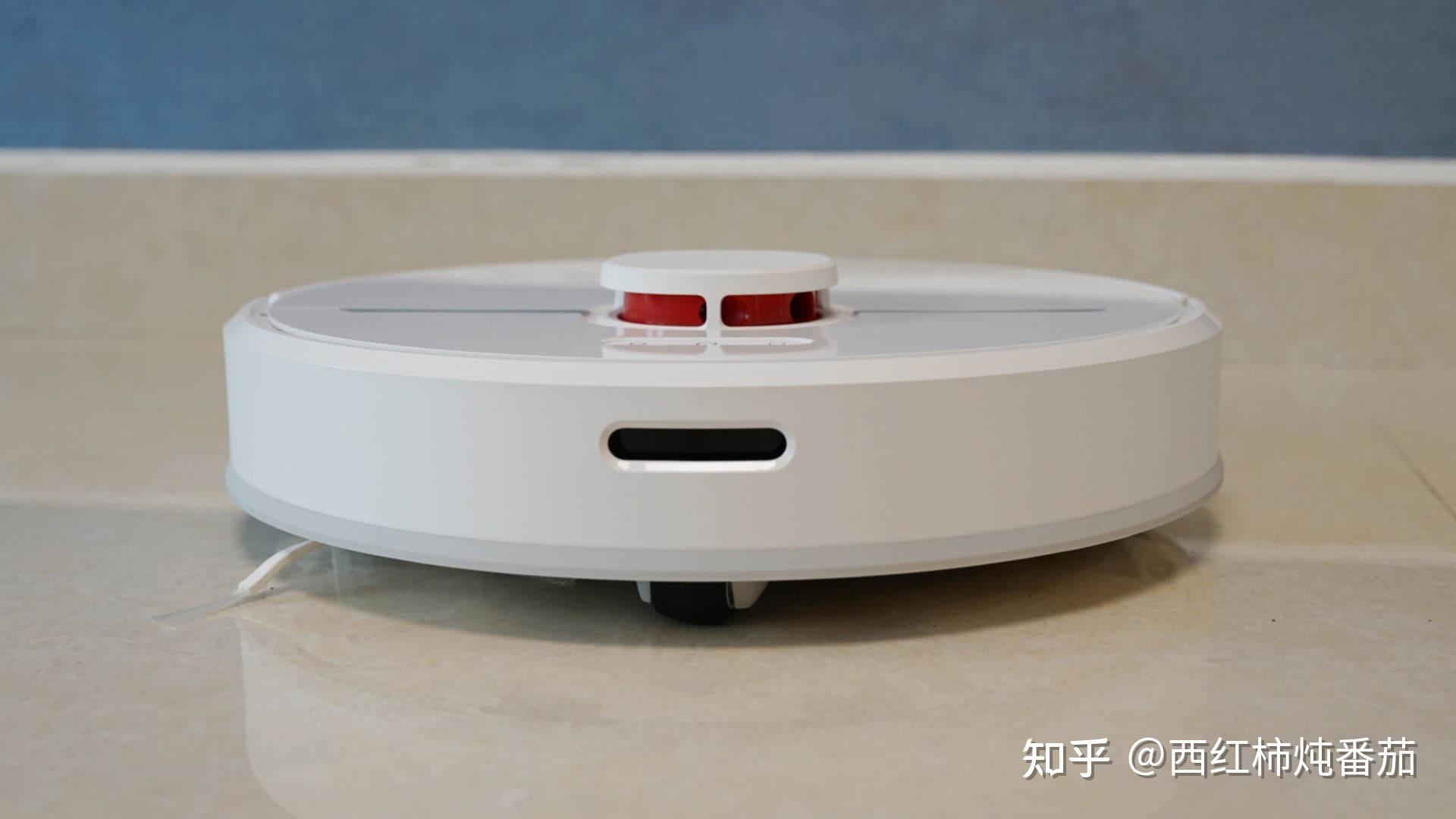
有凸起的激光雷达模块的机器
但是采用激光雷达系统的机器普遍存在一个问题,那就是在机器的顶部,会有一个高高凸起的激光雷达传感器,在面对低矮的家具比如茶几、沙发,甚至床沿的时候,容易被卡住——这也是扫地机器人这几年发展中的一个技术瓶颈。
除此之外,扫地机器人还有两大克星,那就是小块的地毯和杂乱的插排。机器人在遇到这两件东西的时候,常常会被卡住,以至于动弹不得,最后被迫停止工作。

1月末的时候,楼主看到一条资讯:扫地机领域的后起之秀 360发布了一款新产品,型号延续此前的命名风格,继上一代旗舰 X95之后,被冠以“X100”的代号。
相较于此前各品牌发布新品的小幅升级,楼主对 360这次发布的这款机器充满了期待。从此前官方公布的参数来看,这台 360新旗舰 X100主要有三个看点:
①搭载了三目激光雷达矩阵,在避障和导航方面更加智能;除此之外,机器还有很多细节方面的优化,比如增加了负压水箱,升级了虚拟墙设置,拥有 3D立体地图,并且吸力也进一步提升,噪音却比此前更小…

楼主有幸在机器发布后的第一时间就拿到了这款新品,并对机器进行了深度体验。本文,楼主就将以图文的形式,带大家深入了解一下这款机器。
这部分楼主尽量从简,只讲这台机器与众不同的地方,也就是所谓的“差异化”内容。

机器顶部采用烤漆面板,触感和视觉质感都很好,这也算是这款 X100此次的提升之一;顶部有两个按键,分别为启动键和回充键,方便年纪大的长辈一键操作;按键上方的透明区域,乍看之下像极了采用视觉识别系统机器的顶置摄像头——但开篇就说了,这款机器采用的依旧是目前更为先进的激光雷达导航方案。所以这就是个简单的透镜。

机器工作的时候,透镜下面的激光雷达传感器带着灯光高速转动,煞是好看 ▲

这款机器的核心看点就是“三目激光雷达矩阵”:1颗用于导航的隐藏式的 LDS激光雷达+2颗用于避障的 OLS激光雷达 ▲

某机型沿边传感器-红外

某机型前向避障传感器-视觉
很多朋友看到这里可能会疑惑:沿边传感器和前向避障传感器这些不早就已经成为旗舰机的标配了吗?X100看起来也没有什么特殊的!这就不得不提到避障所采用的技术原理了。

最早的机器,无论是侧面的沿边传感器还是正面的防撞传感器,采用的都是红外原理。这类机器延边行走问题不大,但是对障碍物的识别精度较低,经常出现误撞 ▲
再后来,很多旗舰款机器开始把视觉方案用于前置避障,避障精度大大提升,但也因此带来两个问题:一个是视觉方案的老大难问题——在光线较暗处,识别效率会有所降低;另一个则是可能存在的隐私泄露问题。

眼前的这台 360 X100下血本将所有传感器全部替换成激光雷达,从根本上解决了扫地机的避障问题。具体效果楼主下文会有展示。

另外,厂商还将原本顶置凸起的 LDS激光雷达传感器做了下沉设计,雷达信号将从上图的 1/3半圆向外发射 ▲

机身厚度方面,这款 X100做到了目前采用激光雷达方案的同类产品中的最小值,仅有 8.5cm ▲

这里以米家扫拖机器人为例(非直接竞品,并无贬义),两者放在一起,可以看到 X100在机身方面是要比米家更厚一点的;但如果算上米家顶部凸起的雷达模块,360的整机厚度则要低了许多 ▲
机身高度的降低,在两种情况下存在明显优势:

比如楼主家的茶几,米家机器人工作的时候机身恰好可以进入,但是进入后往往会被卡住而无法“脱身”,除非设置禁扫区域,否则每次需要人工脱困,非常麻烦;但眼前这台 X100机身略高于茶几与地面的缝隙,就不会出现上述的尴尬情况 ▲

另一种情况更为直接,比如上图的边几:由于 X100用于建图的 LDS激光雷达做了下沉式设计,所以整机通过性要远远强于其它带顶置传感器的同类竞品,可以轻松进入其他机器无法进入的低矮空间进行清洁 ▲
这算是这台 X100在外观设计上区别于此前其它竞品的最大亮点。
上面已经提到,由于整机机身厚度增加,所以机器拥有了更大的尘盒与更大的水箱。先说尘盒。

除了500mL的超大容积之外,尘盒的造型也完全进行了重新设计,和我们此前所熟悉的尘盒完全不同 ▲

倒尘口-打开状态

取出的 HEPA滤芯
倒尘口和 HEPA滤芯分别位于尘盒的两个对称面;滤芯设计进一步简化,没有了塑料件,需要更换时可以直接抽出,直接降低了后期的维护成本 ▲
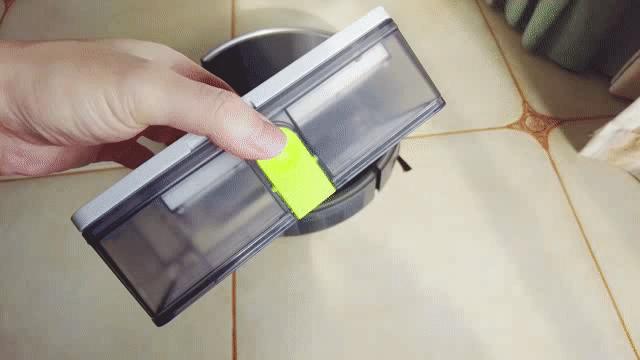
值得一提的是,尘盒倒尘操作可以一键完成,更加方便 ▲

同时改变的还有传统扫地机一侧进风,另一侧排风的设计。这款 360 X100直接把进尘口和排风口放到了同一侧 ▲

水箱容量同样达到了惊人的 520mL,一次可以清洁 300平米大户型,并且水箱和拖地模组进行了分离 ▲

拆装方式上,可以单手完成,非常方便 ▲

机器底部主要展示两点:第一个是这款 X100的悬崖传感器多达 6颗,这是目前同类产品中的最高标准;另一个是这款机器首次采用了地毯检测传感器,可以智能检测到地毯的存在,并对清扫风力等进行优化(下文展示) ▲
外观展示部分就到这里。
这部分主要展示这样几点:1、机器清扫逻辑;2、机器避障及绕障性能;3、机器对插线排的识别;4、通过性测试;5、吸力实测。
至于超大水箱和超大尘盒加持下的续航能力,因为每个人需求不同,文章也会有展示,但不做单独评测。

在完成初次建图之后,这款 360 X100在每次清扫时,会按照不同房间顺序清扫(顺序可自行设置调整);

在清扫每一个房间时,又会先沿着房间边缘先进行一次全局“扫描”,确认现场障碍物位置及家具摆放,接着再按照上面动图所示的路径顺序进行清扫,效率方面属于竞品中的第一梯队水平 ▲

以楼主家的某一次清扫为例,这次数据可以反馈很多问题:
①楼主家房子建筑面积 139平米,这台机器预估为 138平米,这是楼主见过对面积估计最精准的扫地机;
②139平米的房子,扫完仅花费了 48min;
③139平米的房子,一次清扫只消耗了 14%的电量,给大水箱和大尘盒提供了足够的动力续航;

④APP还记录了家中探测到的地毯数量——因为地形关系,其中包含一次客卫门口的门槛石误识别,这是机器后期需要通过软件更新继续优化升级的地方。
不过大家也不用担心目前的这个小问题,我们可以在“首页-高级功能-地毯模式”里面对地毯位置进行重新编辑和校正,还可以设置地毯区域的重点清扫,并选择是否增加吸力 ▲

另外,在“高级功能-通用设置-高级清扫设置”中,我们还可以开启玄关等重点位置的横竖两次清洁 ▲

该功能开启后可以看到,在玄关区域,机器人进行了横竖两次清扫,轨迹为垂直交叉的井字形 ▲
这些都算是这款 360 X100在清扫逻辑细节方面非常实用的优化。
PS:为了看得更加清晰,测试时楼主把餐厅位置也标记成了玄关。
360 X100绕障
首先展示的是这款 360 X100面对袜子这种较小且低矮的障碍物时的避障及绕障性能。通过动图可以看到,这台机器表现令人满意 ▲

某品牌机器绕障
对比其他品牌的绕障,这款机器效率更高,没有了“一步三回头”的动作 ▲
这一点对于普通用户来说差别不大,可能无法明显感受到差别。不过从绕障技术上来说,也算是一个不小的进步。不出意外的话,这也将是未来扫地机绕障技术的发展方向。

接着继续用一个动图展示这款 360 X100在面对小物体时候的避障性能,同样非常出色 ▲

扫地机面对插排以及数据线等物体时候的绕障和避障一直以来都是扫地机的老大难问题。实测中,这款 360 X100虽然表现并不完美,但也算顺利通过,并没有导致电线的缠绕甚至被困住的事情发生 ▲
这里顺便要提一嘴的是,楼主在测试这款 X100的时候,真的是一次地毯或者电线的缠绕事件也没有发生。不过像厨房的地毯,还是会在清扫出现小幅位移。虽不完美,但是真的省心。
由于顶置 LDS激光雷达传感器的下沉式设计,所以机器人整机高度有了大幅的降低。也正因如此,这台 360 X100在面对低矮家具的时候,通过性方面就要比其它同类产品强了不少。
最典型的,比如上面动图所示的场景,这款 360 X100可以恰好通过,但其它产品不行。这也算是这款 X100作为 360新旗舰的一个巨大优势 ▲

说了这么多,这款机器的实际吸力究竟如何呢?根据官方介绍,它的吸力高达 3300Pa。那么这到底是是什么概念呢?这里楼主同样做了一个简单的测试。
实验中,以散落的瓜子壳、整粒瓜子以及开心果壳作为被测试对象 ▲
PS:瓜子这类垃圾应该是我们在生活中会面对的需要清除的最大颗粒的垃圾之一。
第一趟

第二趟

第三趟
通过实测可以看到,在经过来回三趟清扫之后,地面变得干干净净,日常家用完全足够 ▲

上面用实测的形式展示了机器的部分性能,这部分楼主再主观描述几点关于机器的使用感受。

随着 X100的发布,360在软件方面也给出了新玩法,其中之一就是 3D地图。
这个功能的位置比较隐蔽,在“APP-我的-实验室”功能中有开关可以打开。打开后,也仅能在“全屋清扫”模式下,用 3D效果显示 ▲
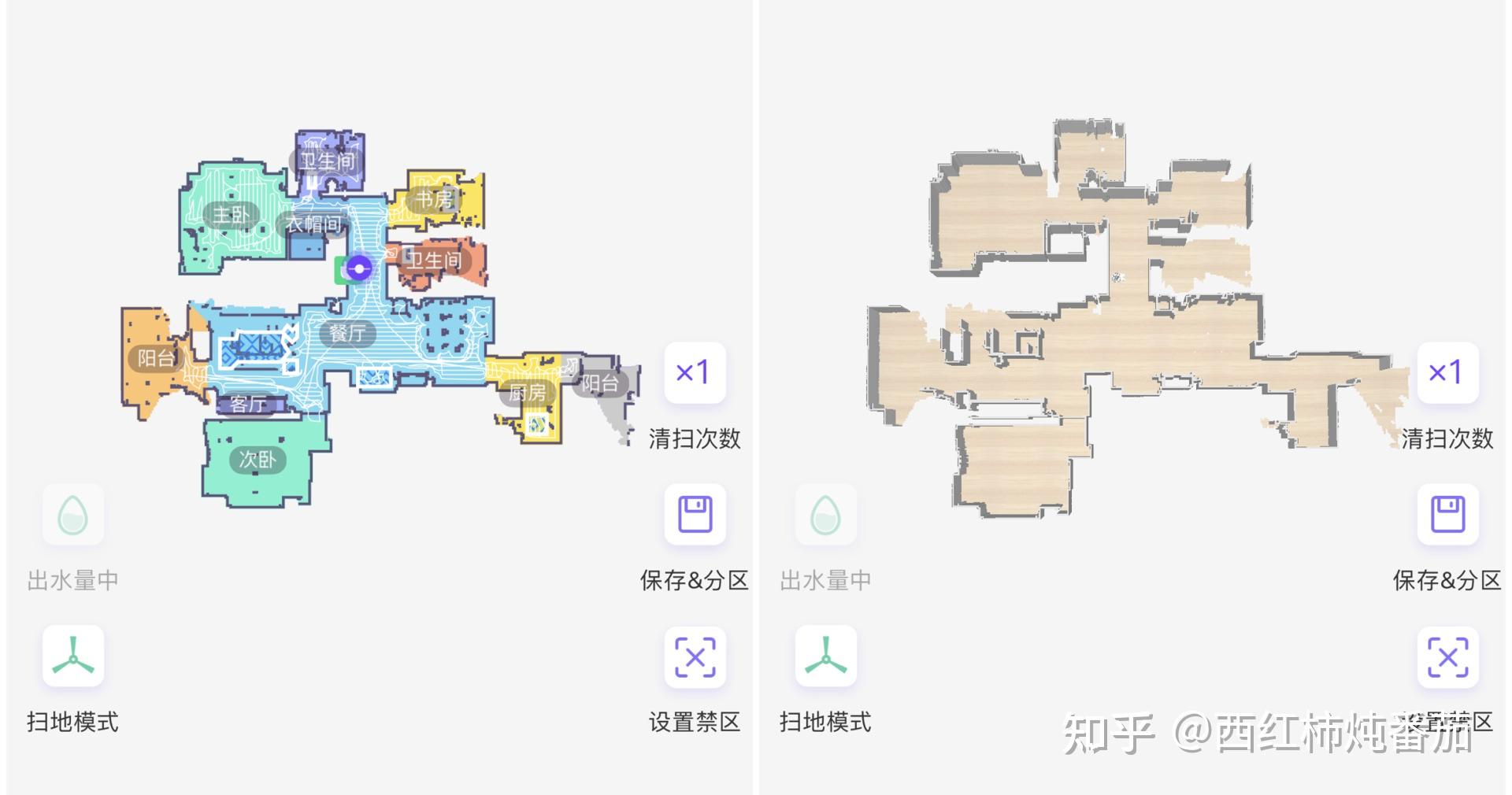
左:普通平面地图;右:3D地图
上图展示的是同一张地图在普通平面模式下和 3D模式下的对比 ▲
所谓的3D地图这样就完了吗?当然不是:

更有意思的是,这个3D地图可以任意切换视角,并调整角度,能非常真实地全览房屋户型。比起传统的平面地图的确要更有优势 ▲
其实从功能路径也可以看出,这个功能目前还处于初级阶段,在实际功能方面没有质变升级,但作为新功能体验一下还是挺有意思的。

用过扫地机器人的朋友都知道,对于传统的扫地机器人,虚拟墙就是一条直线,禁扫/拖区域则是一个可以调整的矩形。这次 360对这个功能也进行了升级。
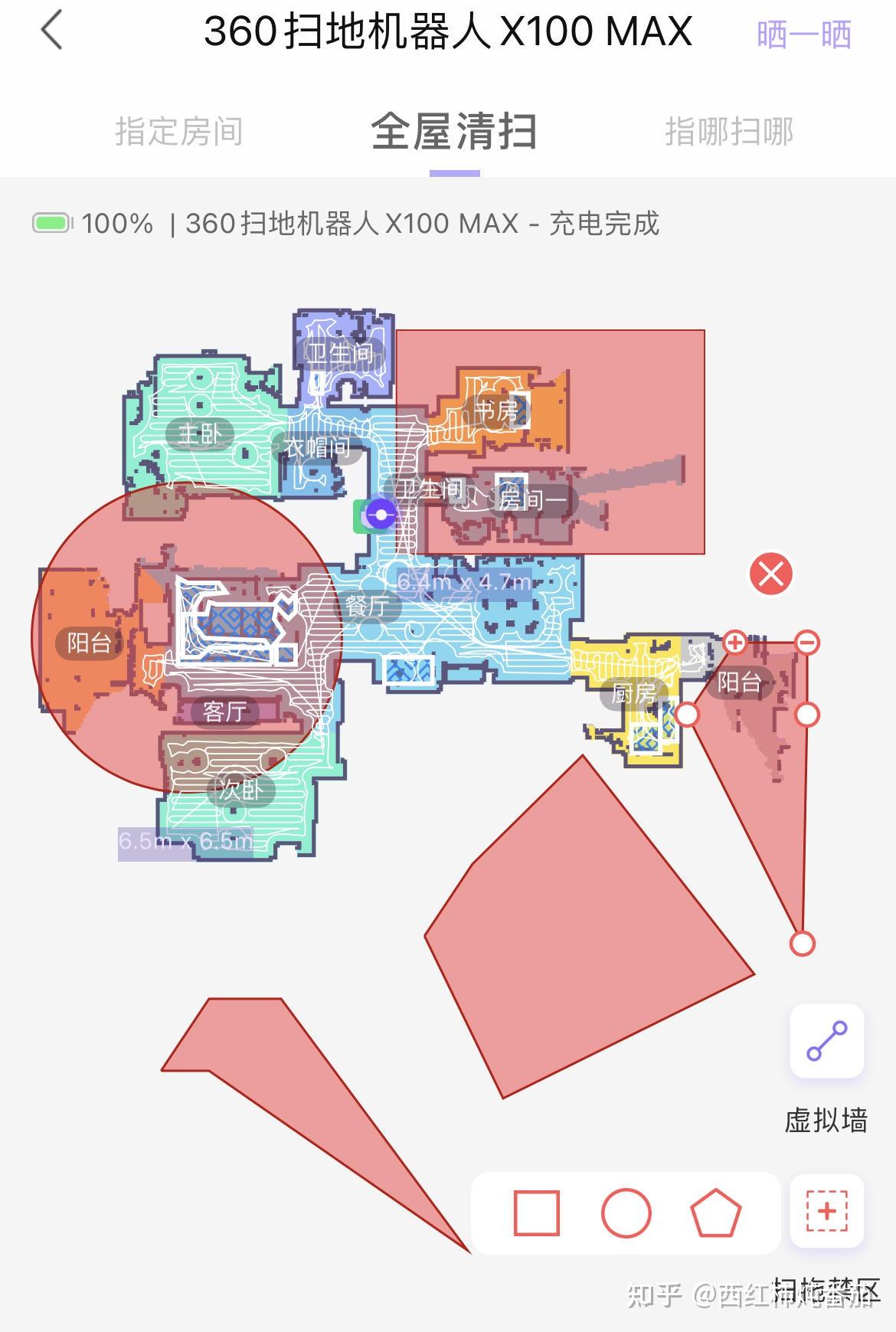
上面的拼图可能看不清楚,所以这里楼主单独再展示一下禁区的设置:其中矩形可以调节长宽比例及大小;圆形可以调节大小;多边形除了调节尺寸之外,还可以点击上图中任意的空心圆圈,设置任意图形 ▲
这样一来,禁区的设置就会明显更加灵活。比如楼主在书房放了一块圆形地毯,这时候直接用圆形框进行设置就会方便很多。

在产品预售的详情页,我们看到品牌对于这款 X100在噪音控制方面进行了大量的优化 ▲
一周多的体验中,楼主也特别留意了机器在运行时的噪音表现。先说主观的感受:噪音的确是小了不少。楼主在书房码字,所有房门全部打开,机器人进行全屋清扫,完全不会觉得吵闹,甚至跑远到厨房等位置时,都不容易感受到机器的存在。

噪音实测
机器共有安静档、标准档、强力档和 MAX档这样四个档位,默认使用标注档,也是上文楼主描述主观感受时的档位。楼主在机器人工作时,站立姿态下实测不同档位下的噪音数值如上 ▲

如果说扫地机器人从无到有是一次跨越,那么在其发展史上的另一次跨越应该是从随机碰撞导航到主动导航。
文章开篇已经讲过,目前主动导航的机器,又有两种导航解决方案:视觉识别系统和激光雷达系统——两者各有利弊,都不完美。如今 360发布的这款新品 X100,对扫地机的 LDS激光雷达传感器做了下沉式设计,从形式上将两种方案的优势结合到了一起;又通过三目激光雷达矩阵的设计,在机器的避障性能方面做了进一步提升。
那么它的出现有没有可能成为扫地机发展史上的第三次跨越呢?可能时间会告诉我们答案。

但无论如何,即便它只是一款普通的新品旗舰,首发仅 2699元的价格,楼主认为还是十分具有诚意的。
本次评测就到这里,至于这款机器是不是“真香产品”,还是各位说了算。如果大家看完对这款机器还有其它任何问题,欢迎在评论区提问,楼主一定知无不言。

感谢各位阅读,我们下一篇再见~
标签组:[机器人] [激光雷达] [扫地机器人] [扫地机] [传感器技术] [机器人传感器]

【良心爆料】哇力N2扫拖洗一体机器人怎么样?是否值得入手,不看后悔!
2021-03-04

2021-03-04

360借条暴力催收天涯(我欠360借条4000多块钱,值得他们上门催收吗?)
2021-02-23

“人工智障”终结者!360发布扫地机器人革命性“黑科技”技术
2021-02-22

2021-02-22

2021年扫地机器人推荐,小白也能秒懂的扫地机器人选购篇(非常靠谱的扫地机器人推荐)
2021-02-17

2021-02-07

2020-12-06

2020-10-06

最新丨微粒贷开通有新操作了!大神们都是这样做的!_贷款_什么值得买
2020-08-03

